



12V alalisvoolu kiire puhur
Puhuri omadused
Kaubamärk: Wonsmart
Kõrge rõhk alalisvoolu harjadeta mootoriga
Puhuri tüüp: tsentrifugaalventilaator
Pinge: 12 VDC
Laager: NMB kuullaager
Kohaldatavad tööstusharud: tootmistehas
Elektrivoolu tüüp: DC
Tera materjal: plastik
Paigaldus: laeventilaator
Päritolukoht: Zhejiang, Hiina
Sertifikaat: ce, RoHS
Garantii: 1 aasta
Pakutav müügijärgne teenindus: võrgutugi
Eluaeg (MTTF): >20 000 tundi (alla 25 kraadi C)
Kaal: 80 grammi
Korpuse materjal: arvuti
Mootori tüüp: kolmefaasiline harjadeta alalisvoolumootor
Kontroller: väline


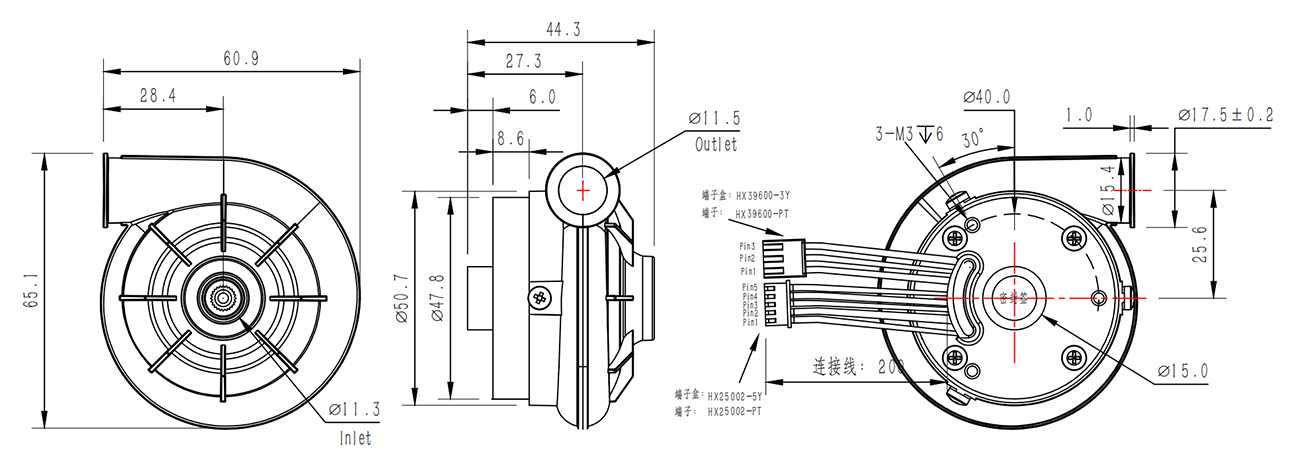
Joonistamine
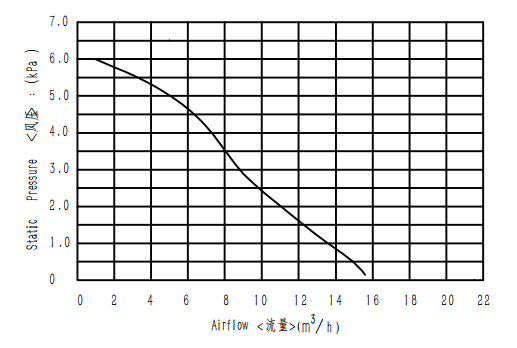
Puhuri jõudlus
12 V alalisvoolu suure kiirusega puhur võib saavutada maksimaalse õhuvoolu 16 m3/h rõhul 0 kpa ja maksimaalselt 6 kpa staatilise rõhuga. Kui see puhur töötab 3 kPa takistusega, kui seame 100% PWM, on sellel maksimaalne väljundõhu võimsus. Sellel on maksimaalne efektiivsus, kui me seadke 100% PWM. Muu koormuspunkti jõudlus on näidatud alloleval PQ kõveral:
Rakendused
Seda puhurit saab laialdaselt kasutada õhkpadja masinal, CPAP masinal, SMD jootmisjaamal.
DC harjadeta puhuri eelis
(1).12V alalisvoolu kiirpuhur on harjadeta mootorite ja NMB kuullaagritega, mis näitab väga pikka eluiga; Selle puhuri MTTF võib ulatuda üle 20 000 tunni 20 kraadi C keskkonnatemperatuuril.
(2). See puhur ei vaja hooldust
(3). Sellel harjadeta mootori kontrolleriga juhitaval puhuril on palju erinevaid juhtimisfunktsioone, nagu kiiruse reguleerimine, kiiruse impulsi väljund, kiire kiirendus, pidur jne. Seda saab hõlpsasti juhtida intelligentsete masinate ja seadmetega.
(4). Puhuril on harjadeta mootoridraiver ülevoolu-, ala-/ülepinge- ja seiskumiskaitse.
Kuidas puhurit õigesti kasutada

KKK
K: Kas müüte ka selle ventilaatori kontrolleriplaati?
V: Jah, me saame selle ventilaatori jaoks pakkuda kohandatud kontrolleriplaati.
Meditsiinilistes ventilaatorites varieerub süsteemi rõhk (voolutakistus) ventilatsiooni ajal oluliselt. Seetõttu on voolukiirust raske kontrollida, kui praeguse voolukiiruse ja eeldatavate süsteemirõhkude suurused ei ole piisavalt hea täpsust. Praegust süsteemirõhku saab mõõta ja kasutada tagasiside juhtimisahelas, et juhtida puhurit selle elektroonilise juhtahela kaudu. Süsteemi rõhk aga muutub olenevalt tegelikust vooluhulgast ja muutub ka puhuri tööpunkt, reageerides süsteemi rõhu kõikumisele. See põhjustab täpsuse piiramise tõttu meditsiinilises ventilaatoris ebastabiilsust. rõhuanduri dünaamiline käitumine jne, mis omakorda põhjustavad ebastabiilse ja ebatäpse voolukiiruse reguleerimise.
Tehnika tasemest on teada erinevad süsteemid, mis reguleerivad voolu. Tavaliselt juhitakse gaasi voolukiirust gaasivooluklapi käivitamisega. Koos edasisuunalise voolu juhtimise võimenduskomponendi ja/või tagasiside veaparanduse (nt proportsionaalne, integraalne ja tuletatud vea tagasiside juhtimine) kombinatsiooniga annab see vajaliku vastuse.
Teine tuntud meetod gaasi voolukiiruse reguleerimiseks on puhuri omaduste selgesõnaline kasutamine. Voolu reguleerimiseks saab kasutada ventilaatori reguleeritavalt muutvat kiirust, mis põhineb süsteemi rõhu ja voolukiiruse vahelisel etteantud suhtel. Puhur on loodud kiiresti reageerima sissehingamise või väljahingamise muutustele, minimeerides selle inertsi. Sel juhul saab gaasivoolu juhtimiseks kasutada ka tagasiside kontrollerit. Süsteemi rõhu kõikumised võivad aga muuta voolukiirust isegi püsiva ventilaatori kiiruse korral. Seda probleemi ei saa tagasiside juhtimisega täielikult lahendada. Pidevalt muutuv süsteemirõhk põhjustab tavaliselt süsteemi ebastabiilsust või võnkumisi sihtvoolu ümber.





